 Metadata catalogue
Metadata catalogue
AUV
Type of resources
Available actions
Topics
INSPIRE themes
Keywords
Contact for the resource
Provided by
Years
Formats
Representation types
Scale
Resolution
-
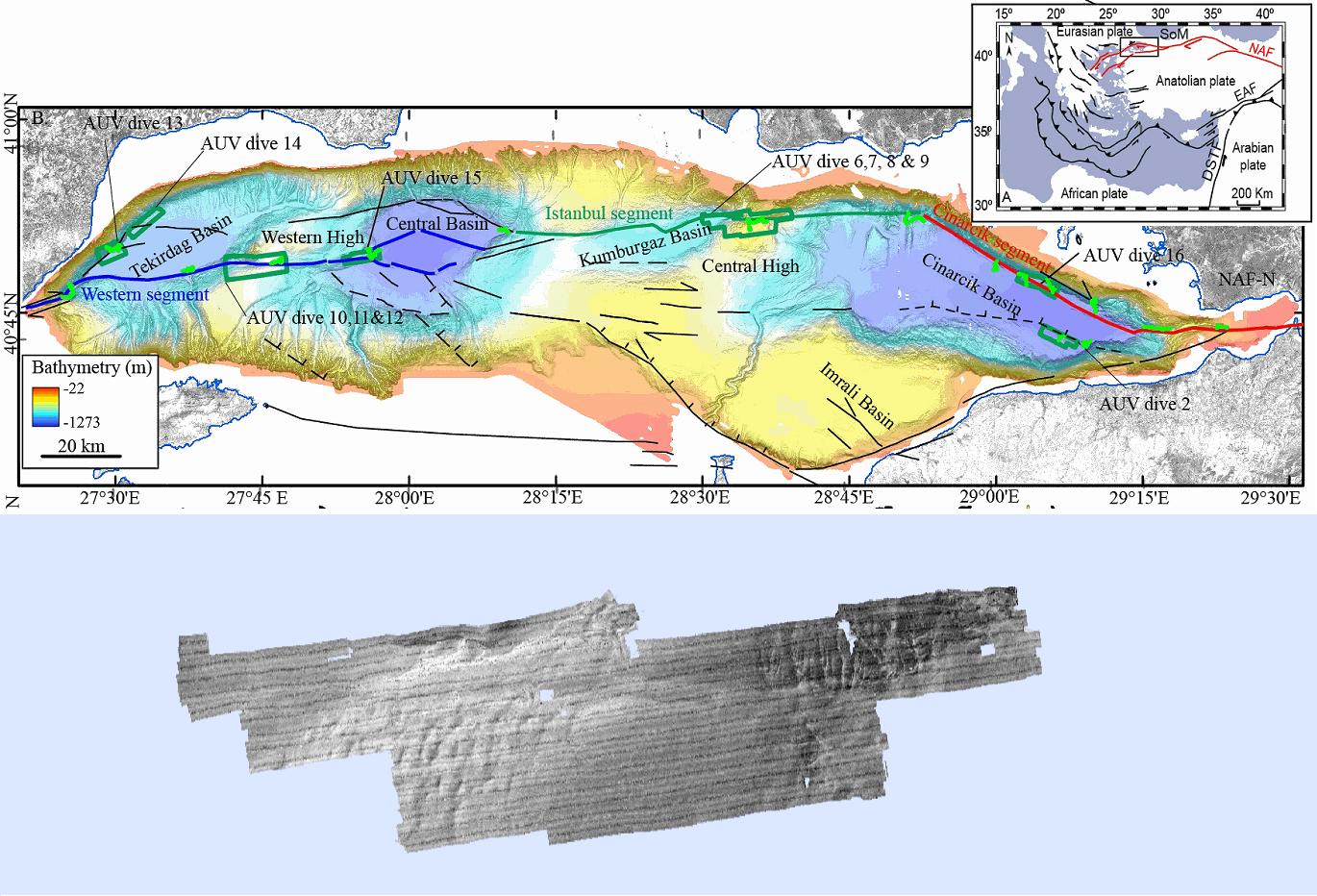
Rétrodiffusion du fond marin en mer de Marmara (Campagne MARMESONET, 2009), au pas de 1 mètre. Les données ont été acquises par le sondeur multifaisceau SIMRAD EM2000, du véhicule sous-marin autonome (AUV) AsterX. Les données sont issues de douze plongées d'AsterX, effectuées sur les escarpements de failles actives du système de failles anatoliennes du nord, dans la mer de Marmara. L'amplitude relative du signal de rétrodiffusion est exprimé en décibels. Les données sont disponibles pour sept zones : - Tekirdağ Bassin ouest (plongée 13) - Tekirdağ Bassin nord-ouest (plongée 14) - Western High (plongées 10, 11 et 12) - Western High est (plongée 15), - Central High (plongée 6, 7, 8 et 9) - Çınarcık Bassin nord (plongée 16) - Çınarcık Bassin sud (plongée 2). Description de la campagne : GELI Louis, HENRY Pierre, CAGATAY Namik (2009) MARMESONET cruise, RV Le Suroît, https://doi.org/10.17600/9020040
-
Near-bottom multibeam bathymetry and acoustic backscatter acquired at the Rainbow Massif (Mid-Atlantic Ridge). High-resolution bathymetry data (2 m/pixel) were acquired by the autonomous underwater vehicle (AUV) IdefX, deployed during the ARC-EN-SUB (https://doi.org/10.17600/18000663) cruise in May 2022. The dataset consists of grids for each individual AUV dive, as well as a global grid merging the ten completed dives. This global grid was obtained by manually shifting and combining original bathymetric grids of each dive using other datasets (primarily shipboard bathymetry from Paulatto et al. [2015]) for geographical reference. The combined grid shows the inter-dive shift artefacts, absent in the individual dive grids. Elevation grids are provided for each AUV dive without interpolation (fillgap 0), with medium (fillgap 3) and high (fillgap 15) interpolation.Acoustic backscatter grids are edited without interpolation (fillgap 0). All grids are provided in NETCDF GMT .grd format, and with two associated GEOTIFFS with the bathymetry DEM, the acoustic backscatter, and the hillshade (illumination) file. All grids are given in WGS84 (WGS 84 - WGS84 - EPSG:4326), in projection Mercator.
-
ODEMAR AUV Abyss (GEOMAR) + shipboard Pourquoi Pas? multibeam bathymetry - 13deg20minN Oceanic Core Complex, Mid Atlantic Ridge Microbathymetry acquired with AUV REMOS 6000 with a SeaBat RESON 7125 multibeam system. Bathymetry data gridded at 2 m (GMT grdfile) - one grid for 13deg20'N Oceanic Core Complex, and one grid for 13deg30'N Oceanic Core Complex - DM_OCC1320_AUV_SHI.grd: Title: ODM_OCC1320_AUV2.grd - ODM_OCC1320_AUV_SHI.grd: Command: grdmath ODM_OCC1320_AUV2.grd ODM_OCC1320_SHI2.grd AND = ODM_OCC1320_AUV_SHI.grd - ODM_OCC1320_AUV_SHI.grd: Remark: - ODM_OCC1320_AUV_SHI.grd: Gridline node registration used [Cartesian grid] - ODM_OCC1320_AUV_SHI.grd: Grid file format: nf = GMT netCDF format (32-bit float), COARDS, CF-1.5 - ODM_OCC1320_AUV_SHI.grd: x_min: -44.97115 x_max: -44.86795 x_inc: 1.7947826087e-05 name: x nx: 5751 - ODM_OCC1320_AUV_SHI.grd: y_min: 13.27915 y_max: 13.34155 y_inc: 1.79361885599e-05 name: y ny: 3480 - ODM_OCC1320_AUV_SHI.grd: z_min: -3924.5378418 z_max: -1905.49023438 name: z - ODM_OCC1320_AUV_SHI.grd: scale_factor: 1 add_offset: 0 - ODM_OCC1320_AUV_SHI.grd: format: classic - ODM_OCC1330_AUV_SHI.grd: Command: grdmath ODM_OCC1330_AUV2.grd ODM_OCC1330_SHI2.grd AND = ODM_OCC1330_AUV_SHI.grd - ODM_OCC1330_AUV_SHI.grd: Remark: - ODM_OCC1330_AUV_SHI.grd: Gridline node registration used [Cartesian grid] - ODM_OCC1330_AUV_SHI.grd: Grid file format: nf = GMT netCDF format (32-bit float), COARDS, CF-1.5 - ODM_OCC1330_AUV_SHI.grd: x_min: -45.00965 x_max: -44.88125 x_inc: 1.79454926625e-05 name: x nx: 7156 - ODM_OCC1330_AUV_SHI.grd: y_min: 13.48665 y_max: 13.52225 y_inc: 1.79254783484e-05 name: y ny: 1987 - ODM_OCC1330_AUV_SHI.grd: z_min: -3244.60083008 z_max: -2087.49829102 name: z - ODM_OCC1330_AUV_SHI.grd: scale_factor: 1 add_offset: 0 - ODM_OCC1330_AUV_SHI.grd: format: classic
-
Near-bottom multibeam bathymetry and back-scatter data acquired along the Amorgos and Santorini-Amorgos faults, in the Aegean sea. High-resolution bathymetry data (1 m/pixel) were acquired by the autonomous underwater vehicle (AUV) IdefX, deployed during the AMORGOS-22 cruise (https://doi.org/10.17600/18001479) with the MBES EM2040. The dataset consists of six DEMs as well as fourteen back-scatter mosaics (i.e. two versions for each dives, raw and processed (compention of the antenna diagram)). In addition, a DEM extracted from dive 2 is provided. The bathymetric data were processed with GLOBE, while the back-scatter data were processed with Sonarscope. Renavigation of the vehicule was necessary during processing and is applied to both the bathymetric grids and backscatter mosaics. Files are provided in TIF format, projected in UTM 35 N (WGS 84).