 Metadata catalogue
Metadata catalogue
/Physical Environment/Bathymetry/Digital Terrain Model
Type of resources
Available actions
Topics
INSPIRE themes
Keywords
Contact for the resource
Provided by
Years
Formats
Representation types
Update frequencies
Scale
Resolution
-
The EMODnet Bathymetry World Base Layer (EBWB) service is a gridded representation of worldwide bathymetric and topographic coverage adapted for a better representation of seabed morphological features. Based on modern WMTS schema, it allows a fluid and powerful rendering. For the global oceans EBWB1 is composed of the 2018 EMODnet Bathymetric grid around Europe (approx. 100m resolution) and uses the GEBCO 2019 grid (approx. 500m resolution) elsewhere in the marine environment. Land coverage is based on a combination of 30 arc second ASTER GDEM, SRTM3, EU-DEM, and Global 1 second world-wide water body map for the topographic part. This compilation of publicly available data sources have been merged and pre-tiled for rendering, at 10 levels of zoom starting from 1/24th of an arcminute (approx. 75m resolution). The EBWB1 service is available in non-projected system (Lat, Long, WGS84: EPSG:4086), Web Mercator (EPSG:3857), Inspire compliant ETRS-EALA projection (EPSG:3035) and projections adapted to both poles (ESPG 3031 and 3996) Service URL: https://tiles.emodnet-bathymetry.eu/wmts/1.0.0/WMTSCapabilities.xml
-

DTM data source was created by taking contour lines and spot soundings from Norwegian Electronic Navigational Charts. NOTE: Data east of appr.
-
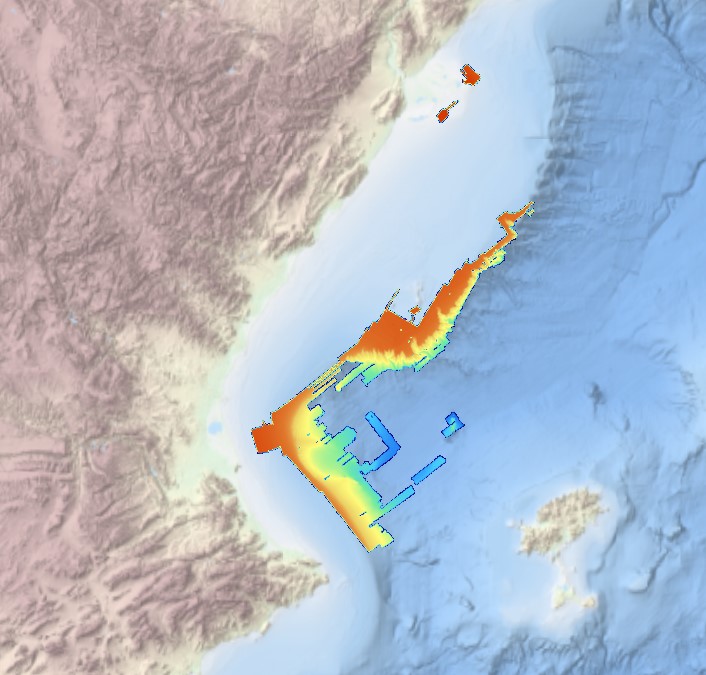
This composite Digital Terrain Model (cDTM) is a high resolution bathymetry dataset that covers CASCADES-I, CASCADES-II, COSTEM-1, COSTEM-2, COSTEM-3, COSTEM-4, FORMED-2, FORMED-4 and FORMED-6 cruises. Multibeam data acquired in 2008, 2009, 2010, 2011, 2013, 2014 and 2015 on board the R/V Sarmiento de Gamboa and the R/V García del Cid with an Atlas Hydrosweep DS-3 and an Elac Seabeam 1050D echo-sounder.
-
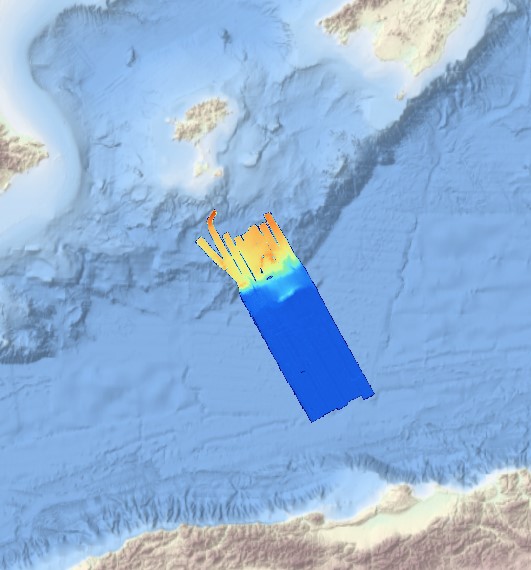
This composite Digital Terrain Model (cDTM) is a high resolution bathymetry dataset that covers SALTFLU cruise. Multibeam data acquired in 2012 on board the R/V OGS Explora with a Reason 8150 echo-sounder
-
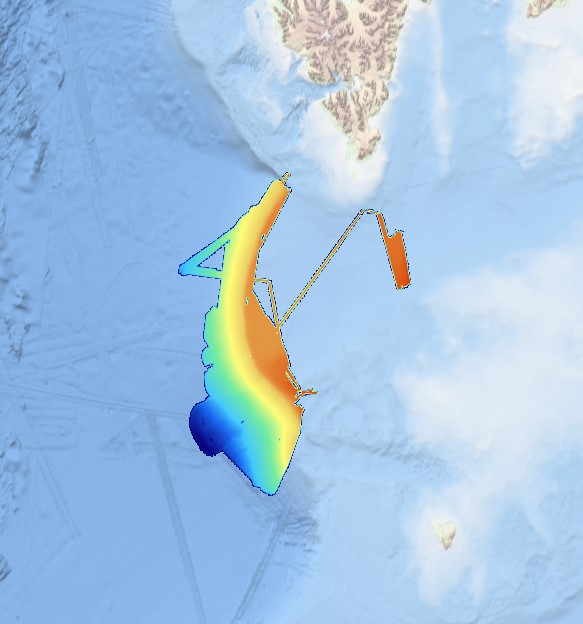
Multibeam data acquired in 2007 during the SVAIS cruise on board the R/VHespérides with a Simrad EM12 echo-sounder
-
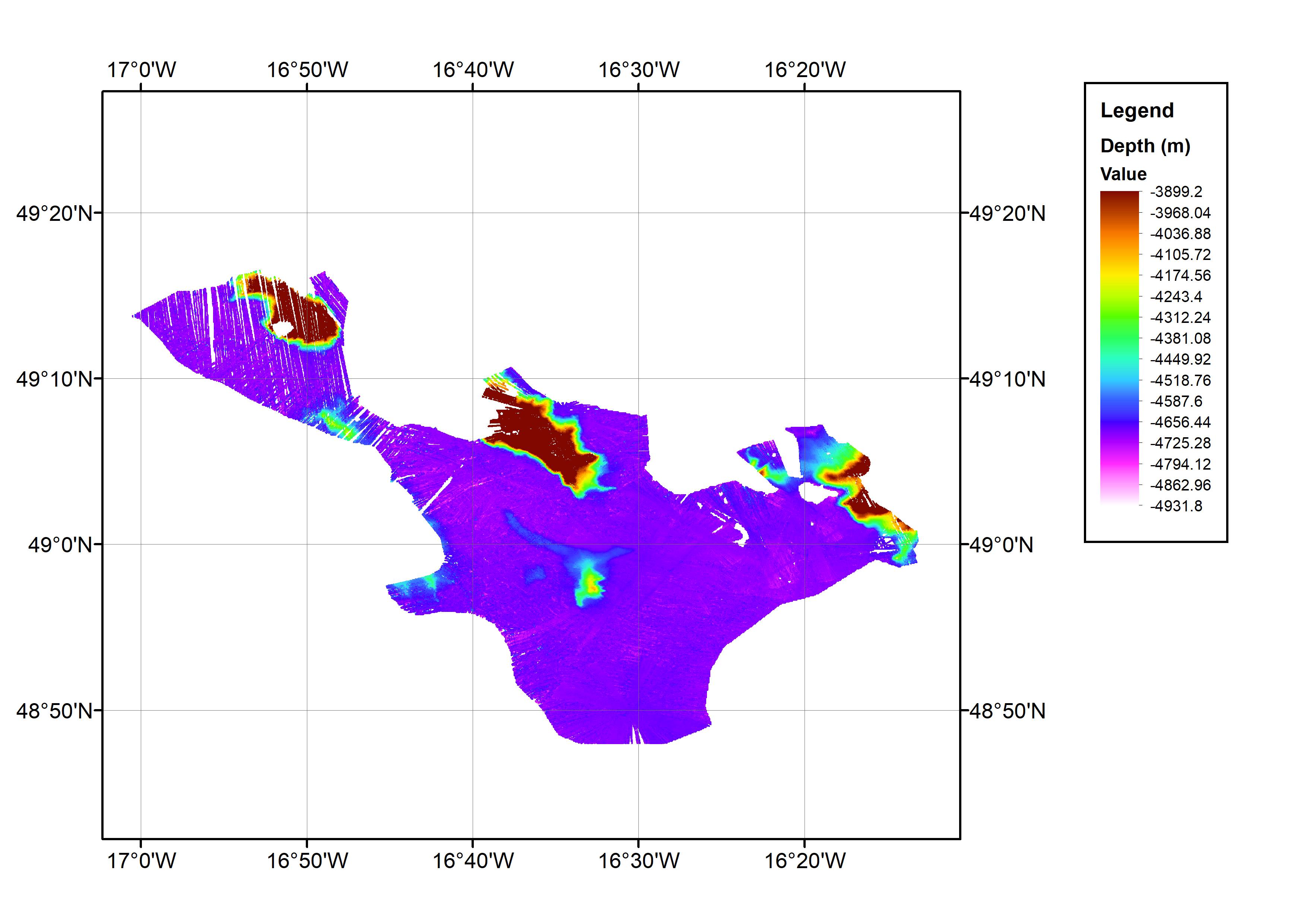
This data set consists of a bathymetric grid derived from multibeam bathymetry data from cruise JC071. The bathymetric grid was created by gridding cleaned raw multibeam data from JC071 at 1/64 arc-minute intervals. The data set covers an approximate one degree square with the minimum and maximum longitude and latitude co-ordinates: 17.016667W-16.216667W; 48.78333N-49.28333N. This is located in the Northeast Atlantic Ocean area. The data were collected from 7th-8th May 2012 using an EM120 Multibeam Echo-sounder. The cruise was part of the Porcupine Abyssal Plain (PAP): sustained ocean observation project. The bathymetry data were collected on an opportunistic basis during the cruise. The cruise was operated by the National Oceanography Centre (NOC), equipment operated by National Marine Facilities Sea Systems. The bathymetric grid was created by BODC for contributing to the EMODnet HRSM Project.
-
Systematic survey performed by Italian Navy Hydrographic vessels with Multibeam EchoSounder
-
Joint composite of SI Survey Bathymetry dataset (composite of 3 surveying years within 2007-2009).
-
Systematic survey performed by Italian Navy Hydrpgraphic vessels with Multibeam EchoSounder
-
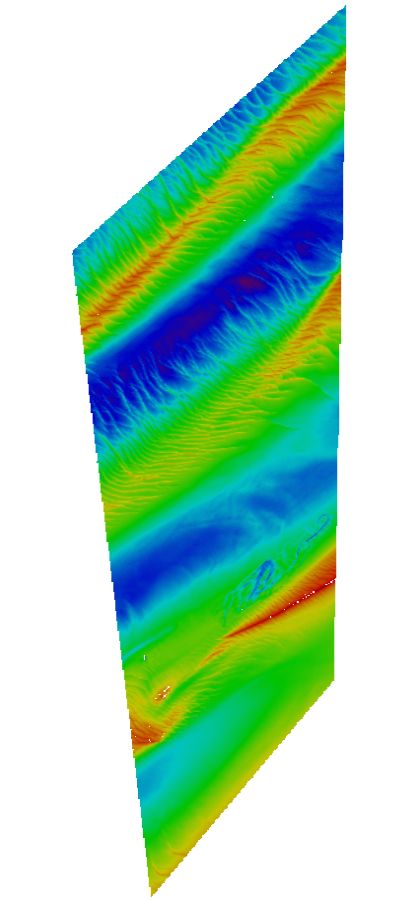
Maas West Outer Vlissingen, South part. There are sand waves. Surveyed by one of the Hydrographic Survey Vessels of the Royal Netherlands Navy.